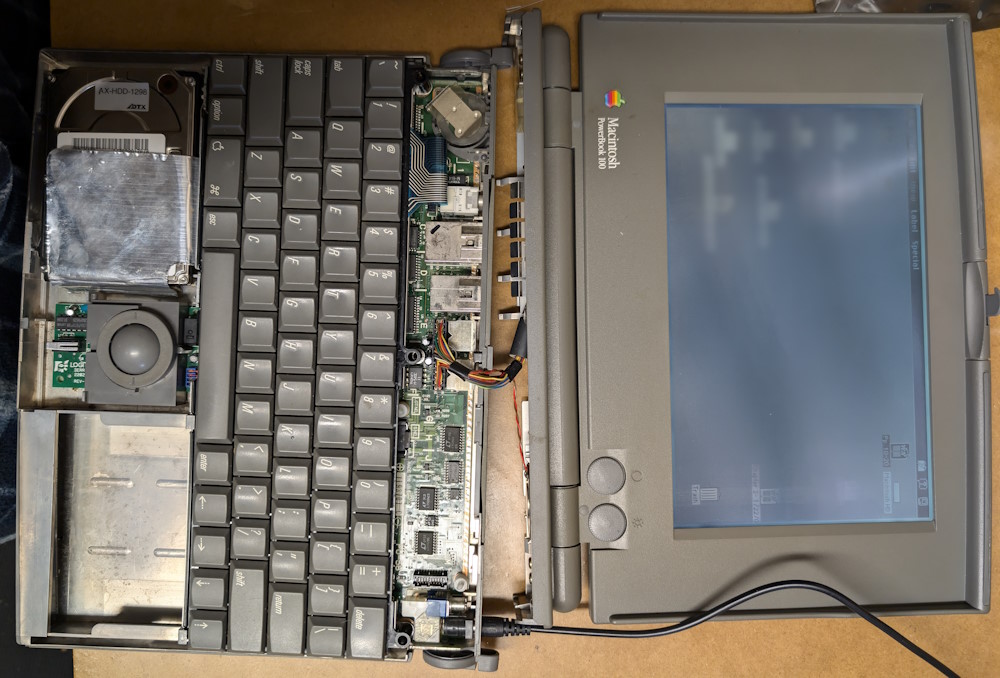
In the course of my hobby of restoring old computers, I sometimes come across a laptop that has a broken floppy drive. This is almost always true for much older floppy drives that use a belt mechanism for spinning the disk, instead of a direct-driven spindle motor. These floppy drives are just the worst: the belt is nearly always broken, or too weak to work properly, rendering the drive useless. Replacements for these belts are impossible to obtain in the exact thickness and diameter, and wouldn’t really be a permanent fix anyway. So, rather than attempting to repair the drive with a new belt, I’d like to connect a more “proper” floppy drive, say, a known-good drive from another laptop, or even a drive from a desktop PC.
The problem is that older laptop floppy drives connect to a ribbon cable that is 1.25mm pitch, whereas newer laptop floppy drives use a 1.0mm pitch connector. If only there was an adapter that joins these two configurations… Fortunately there are open-source PCB designs for a couple of options: the first is a ribbon cable that is 1.25mm pitch on one end, and 1.0mm pitch on the other, and the second is a PCB that has both 1.25mm and 1.0mm connectors that are joined together. Either of these variations will work for my purposes, and I obtained both of them!
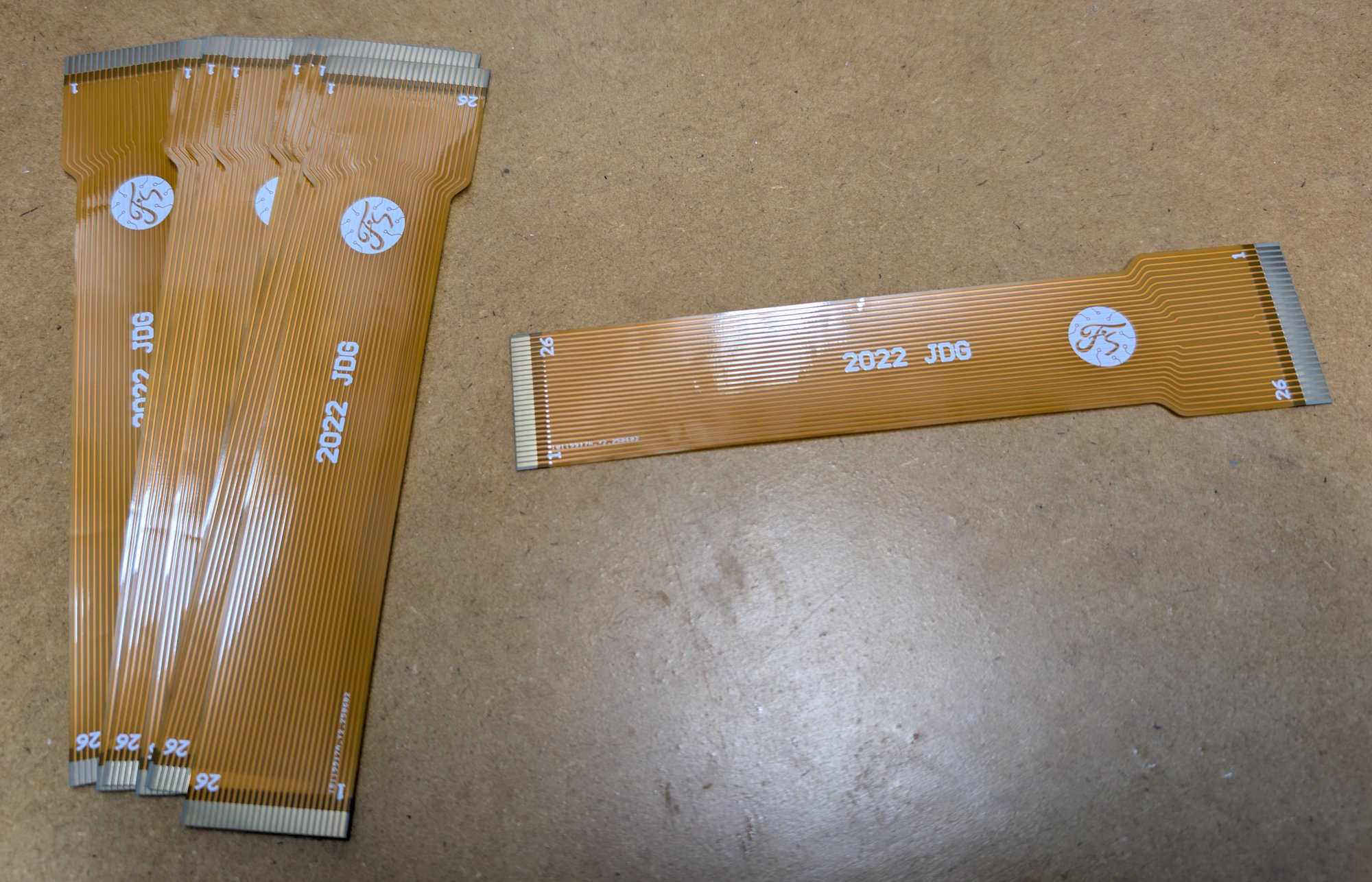

For both of the above options, you must use them in conjunction with a reverse-direction ribbon cable that will ultimately connect to the floppy drive.
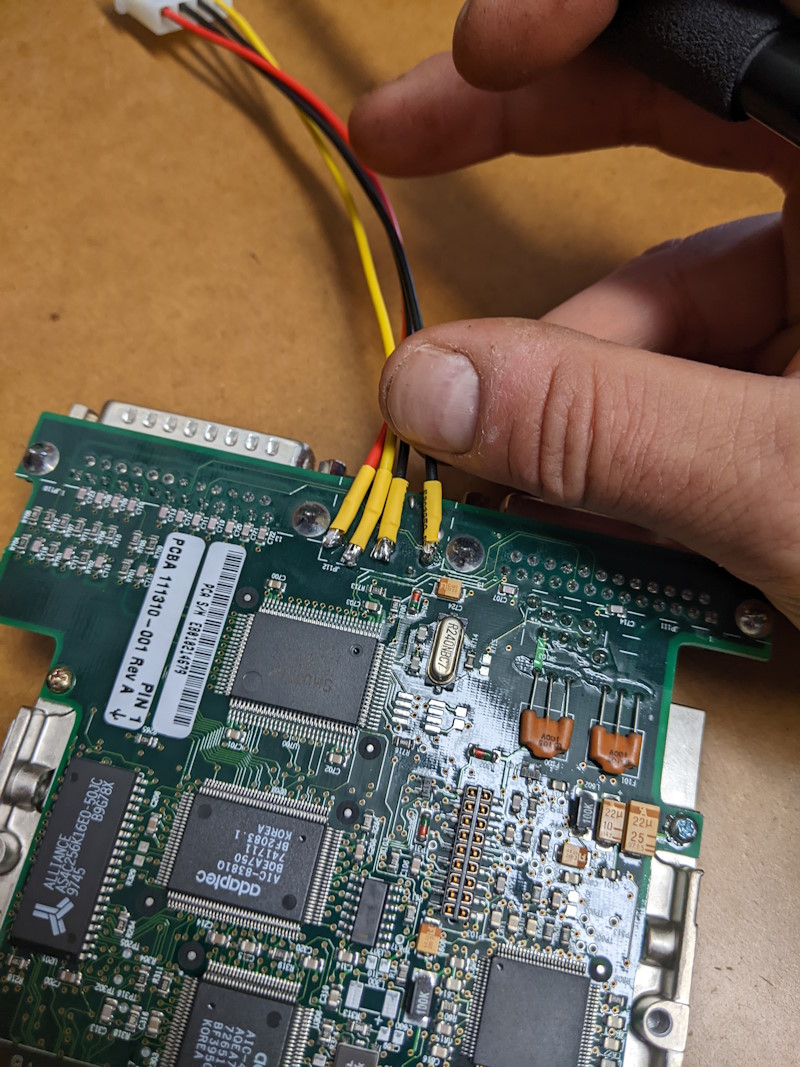
This was actually my first time ordering custom-printed PCBs, and the experience couldn’t have gone smoother. It was also my first time using solder paste to solder a surface-mounted connector. That experience could have definitely gone smoother — my technique with solder paste needs a lot of refinement, but one step at a time. At least the adapter works!
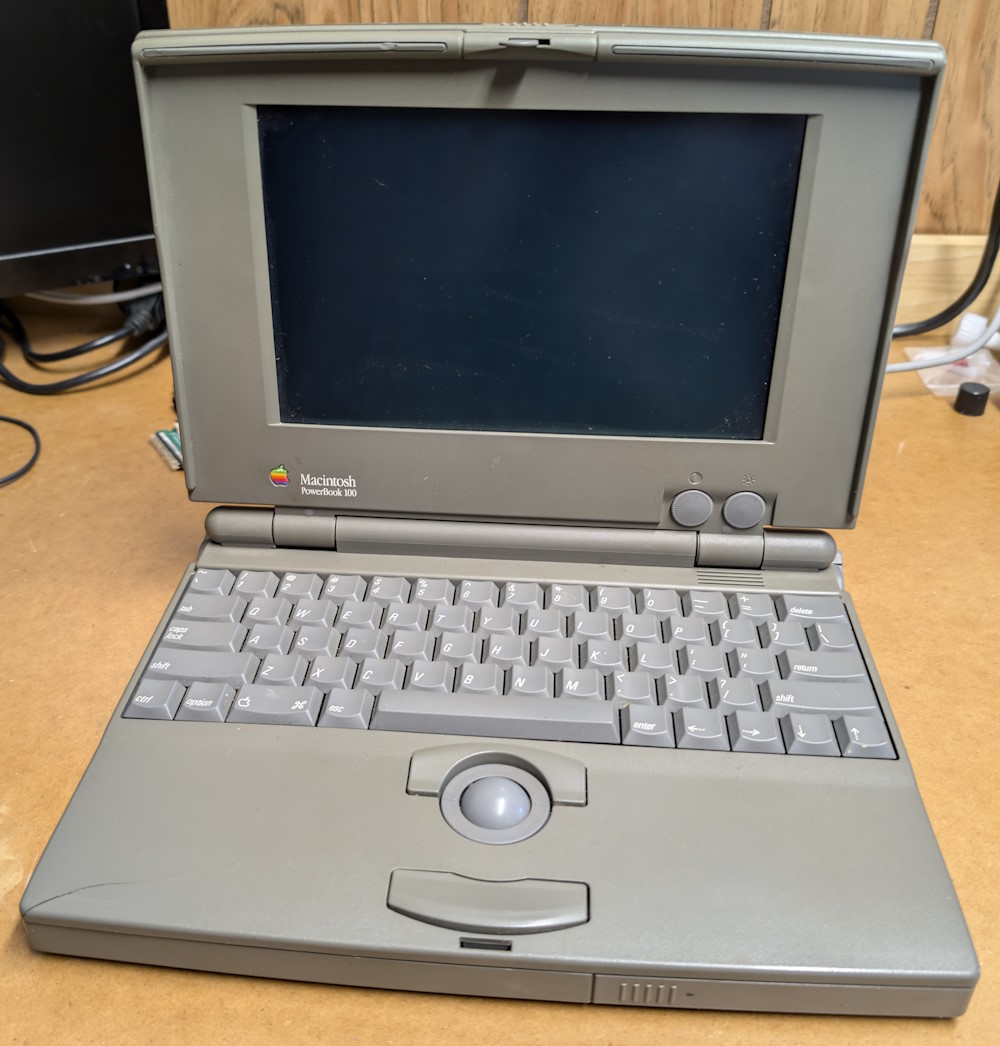
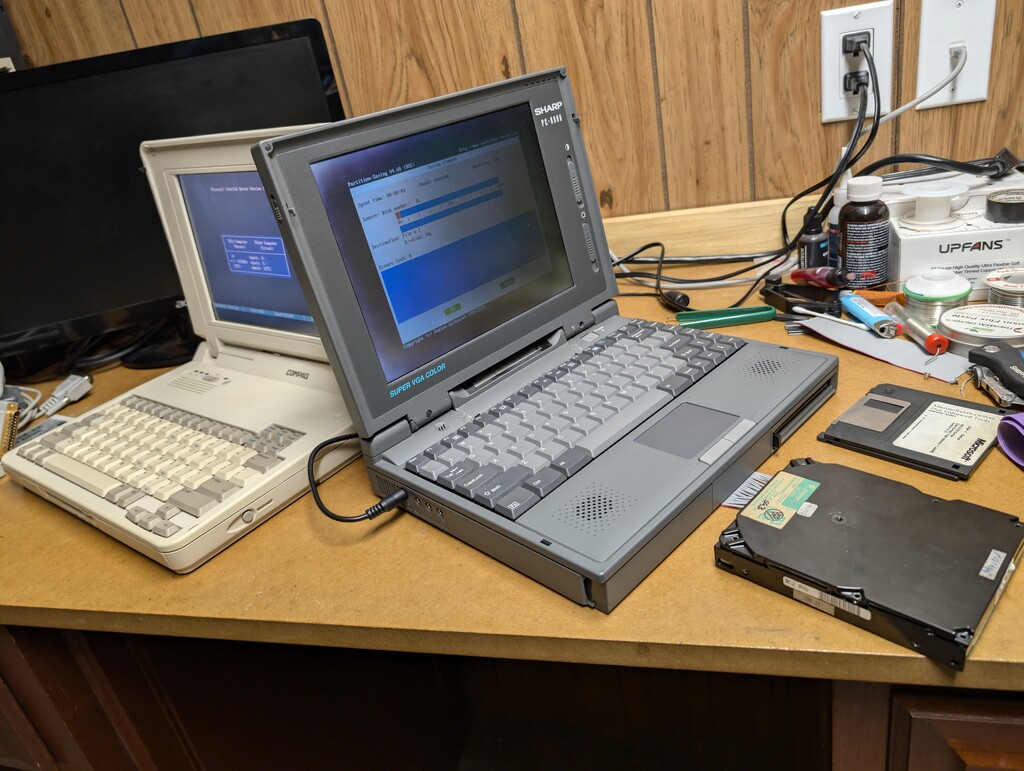
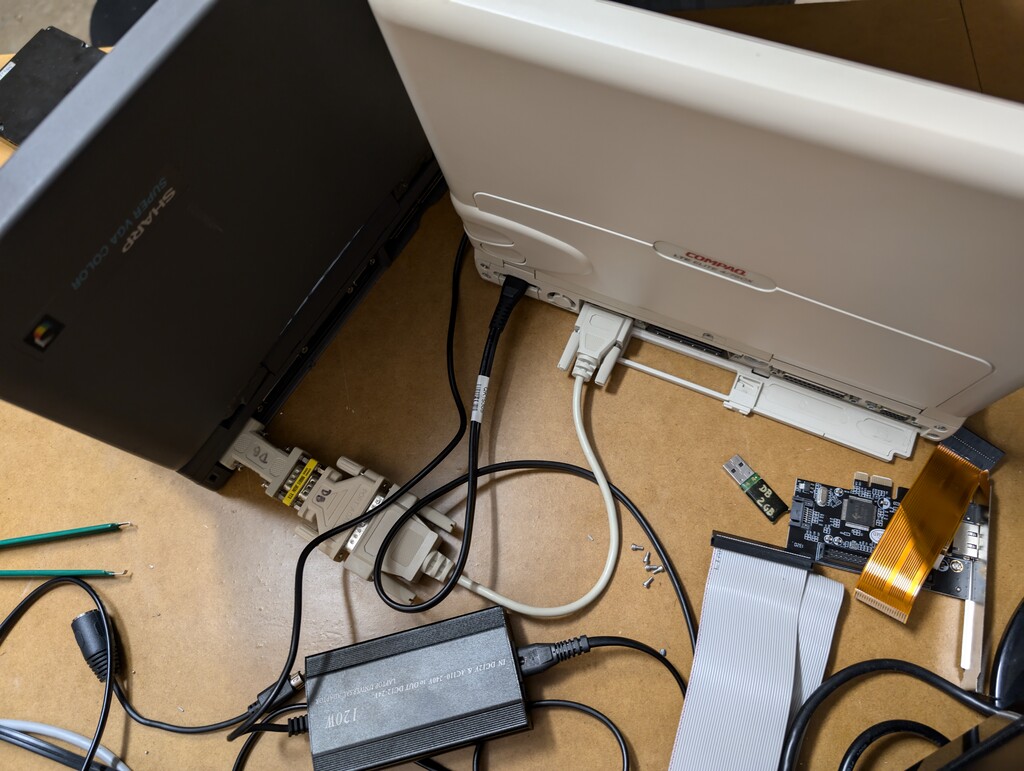
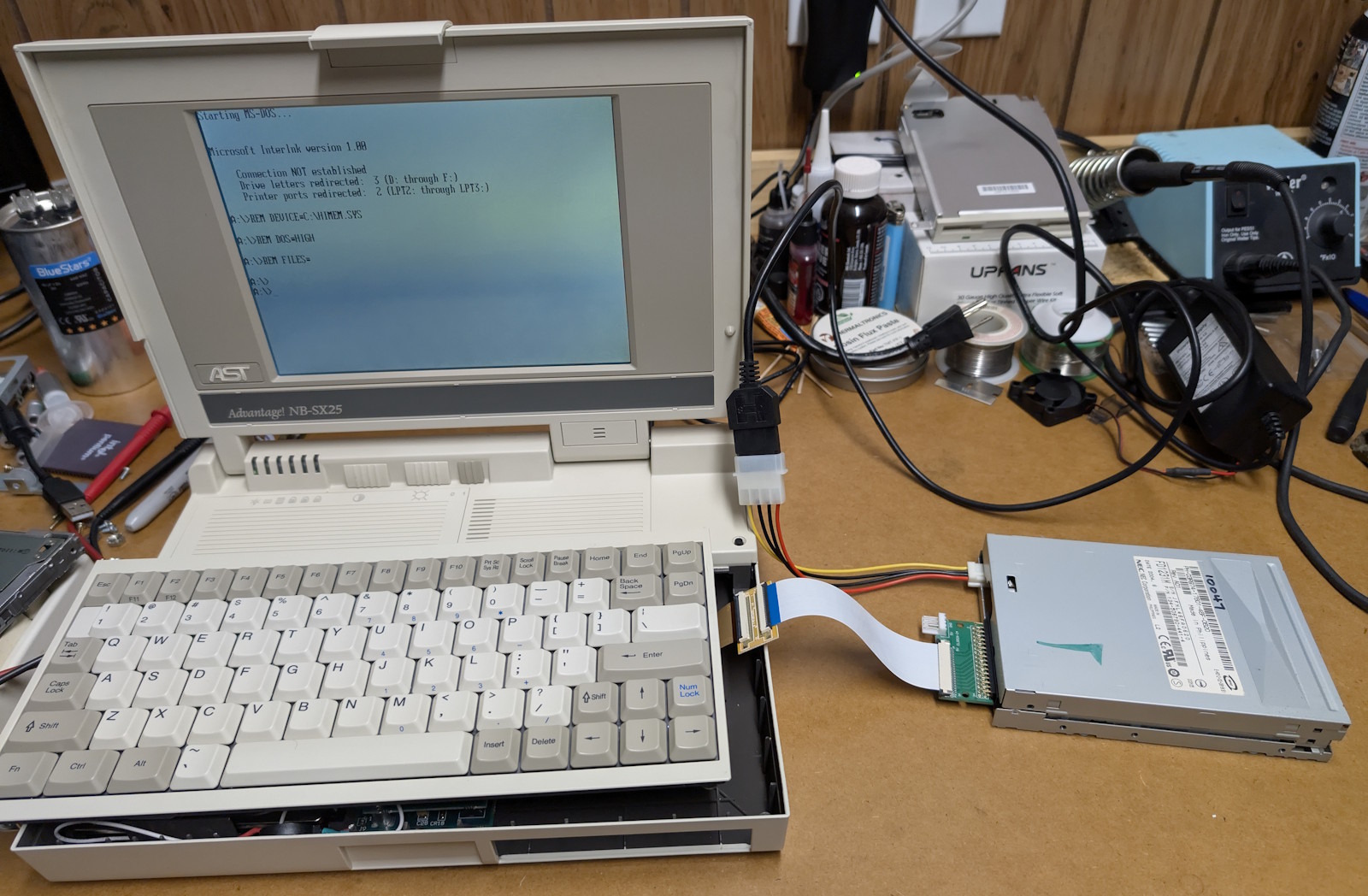
Here is an example Frankenstein experiment I tried: an AST Advantage NB-SX25 laptop, which I restored recently, communicating with a desktop PC floppy drive, with the help of the aforementioned 1.25mm-to-1.0mm ribbon cable (plus an adapter that goes from a 1mm ribbon cable to a 34-pin FDC connector, which is widely available on the web):
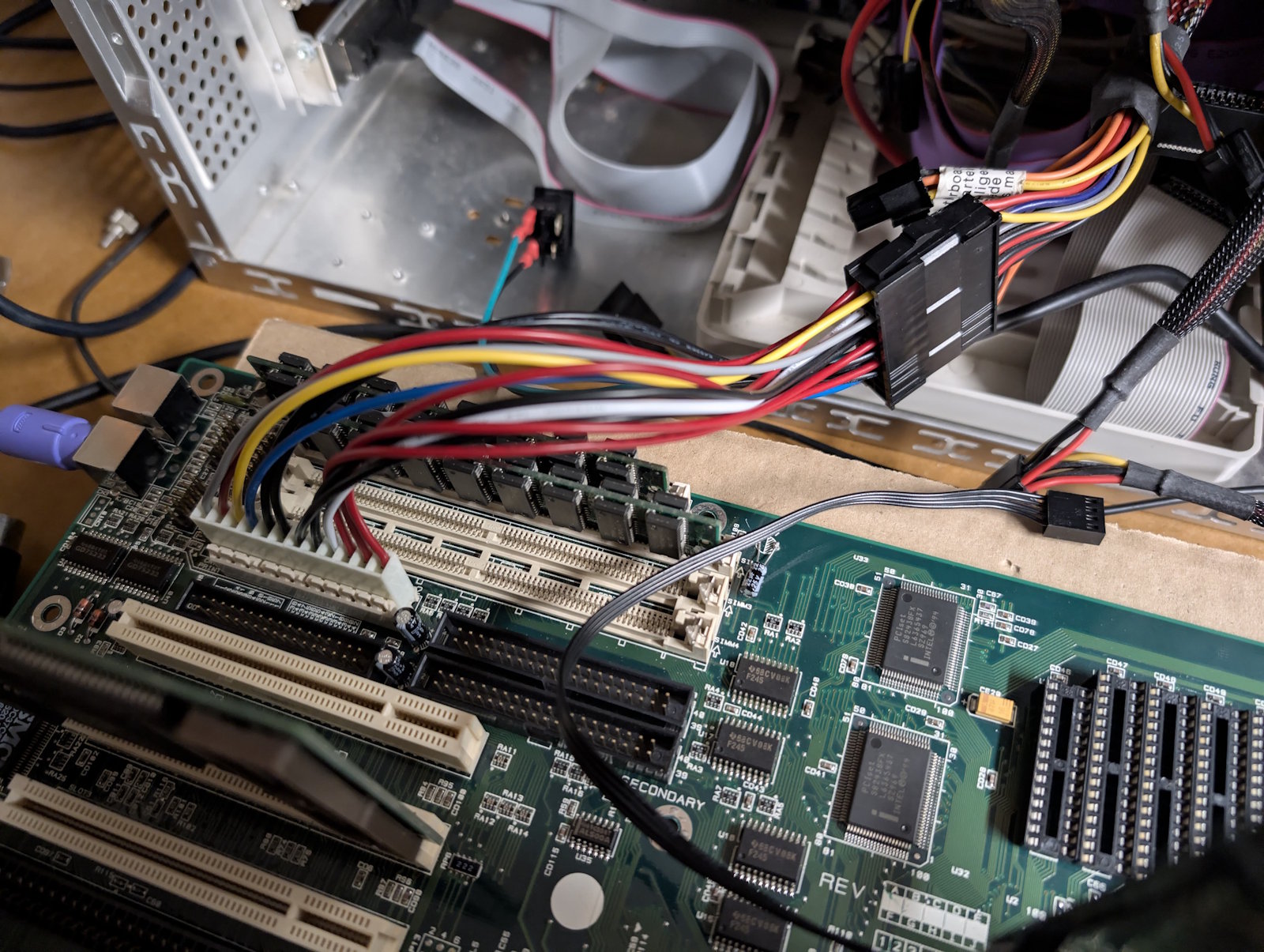
On a semi-related topic, what if you have an old motherboard that has an AT-style power connector (P8 and P9), but you only have an ATX power supply? Not to worry — there are readily available adapters that convert from ATX to AT connectors. However, here’s something to keep in mind: certain ATX power supplies require a load on the 5V rail in order to properly regulate 12V. The symptom becomes: you turn on the power supply, the motherboard starts to boot, but then suddenly shuts off after a few seconds. This is potentially the cause: instead of only connecting the P8/P9 connectors to the motherboard, you must also connect a load to 5V; a couple of fans should do the trick.